速度最快 250fps!实时、高性能车道线检测算法 LaneATT
CVPR 2021 车道线检测方向论文: Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection 。
论文:
https://arxiv.org/pdf/2010.12035.pdf
代码:
https://github.com/lucastabelini/LaneATT
0
动机
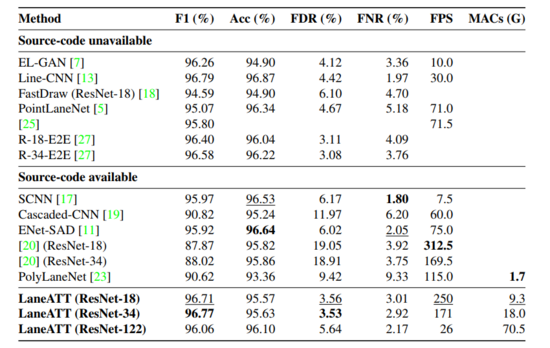
车道线检测是自动驾驶领域非常重要的子任务之一。作者提出了一个实时、高性能的车道线检测算法,将其命名为LaneATT。
该方法基于anchor实现,且应用了注意力机制,轻量级版本的推理速度达到250FPS。
01
网络结构 1.1 总体流程
算法总体流程如下图所示:
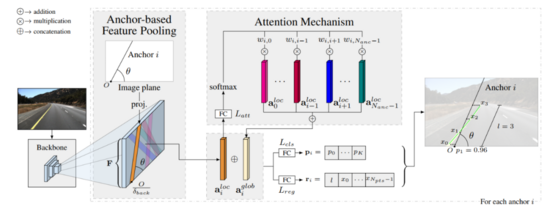
将车辆前视相机采集到的RGB图像作为输入,输出车道线位置。
从上图中可以看出,该算法将backbone的输出结果进行池化操作,以提取每个anchor的特征;将提取到的特征与注意力模块产生的全局特征进行融合,以解决遮挡、光照等原因导致车道线检测不到的问题;融合后的特征作为全连接层的输入,全连接层输出车道线的置信度和相关参数。
1.2 车道线和anchor的表示方法
车道线的表示
沿图片纵向做等分操作,得到的等分点记作,其中。
对于每条车道线,令固定,因此决定了每条车道线的差异;每个都与对应的形成车道线上的一个点。
由于车道线不会贯穿整张图像,令和分别表示的开始索引和结束索引,用于表示车道线的连续有效点。
anchor的表示
使用原点和方向表示anchor,其中。
原点总是位于图像的左、右、下三个边界上。
1.3 Backbone
使用诸如ResNet的通用网络作为LaneATT的backbone;将backbone的输出特征记作。
为减少后续模块计算量,对做卷积,将输出结果记作。
1.4 feature pooling
对于每个anchor,都要从中提取特征,使用坐标索引要从中提取的特征点。先定义这些坐标点的方向坐标:,使用如下公式求它们对应的坐标:
上式中的和表示anchor的原点和方向,表示特征对应原图的步长。
对于每个anchor,使用上述的和,从中提取到特征;若上述计算得到的某个点的坐标值超出的范围,则中对应位置的值为0。
1.5 注意力机制
上文提到的feature pooling操作得到的为局部特征。为了能够应对遮挡、光照等复杂场景,需要将局部特征与全局特征融合。
作者使用注意力模块,该模块的输入为局部特征,输出为全局特征。
注意力模块中包含一个全连接层,对于索引为的anchor,该anchor对应的局部特征作为的输入,的输出为权重:
用于融合除第i个anchor以外的其他anchor对应的局部特征从而形成全局特征:
以上内容只是针对索引为i的anchor;对于所有的anchor,可以使用矩阵乘法快速实现。假设anchor的数量为,令,,使用如下矩阵乘法计算所有anchor对应的全局特征:
上式中,且。
1.6 prediction head
对于索引为i的anchor,其局部特征和全局特征做concat操作,输出结果记作。作为2个并行的全连接层的输入,其中一个全连接层用于分类,输出信息为;另外一个全连接层用于回归,输出信息为。
对于每个anchor,网络最终输出3类信息:
(1)个概率值,用于预测该anchor对应的车道线类别和背景的概率。对于不包含车道线类别标注信息的数据集,令。
(2)个offset值,指出anchor中个点和预测出的车道线上点的横向偏移。
(3)车道线的长度,是anchor中实际用来表示车道线的点的数量。根据1.2节中的信息,和分别表示的开始索引和结束索引,其中可由anchor原点的坐标决定,长度可用于确定的值:
1.7 NMS
定义2条车道线和的距离为:
上式中,。
使用上述定义的距离对网络预测结果进行NMS操作,减少false positive的数量。
02
模型训练 2.1 ѵ
相关阅读
-

云安全日报210527:Ubuntu配套LZ4解压缩软件发现执行任意代码漏洞,需要尽快升级
Ubuntu是一个以桌面应用为主的Linux操作系统。它是一个开放源代码的自由软件,提供了一个健壮、功能丰富的计算环境,既适合家庭使用又适用于商业环境。Ubuntu将为全球数百个公司提供商业支持。 ...
查看全文 -
云计算核心技术Docker教程:清理未使用的Docker对象
Docker采取了一种保守的方法来清理未使用的对象(通常称为“垃圾收集”),例如图像,容器,卷和网络:除非您明确要求Docker这样做,否则通常不会删除这些对象。这可能会导致Docker使用额外的磁盘空...
查看全文 -

消息称亚马逊、微软、谷歌正竞购波音公司10亿美元云合同
新浪科技讯 北京时间5月27日晚间消息,据报道,四位知情人士今日透露,亚马逊、微软和谷歌这三大云计算服务提供商,正在竞争波音公司(Boeing)价值10亿美元的云服务合同。 这些...
查看全文 -
亚马逊难逃反垄断惩罚?美国又有三个州加入调查
新浪科技讯 北京时间5月27日晚间消息,据报道,多位知情人士今日称,继加州、纽约州和华盛顿州之后,马萨诸塞州和宾夕法尼亚州的总检察长也加入到对亚马逊的反垄断调查中。 如今,越来越...
查看全文
您好!请登录